
Robot cân bằng (arduino, ez-gui)
- Mar 31, 2020
- 3 min read
Updated: Oct 3, 2024

I. Linh kiện

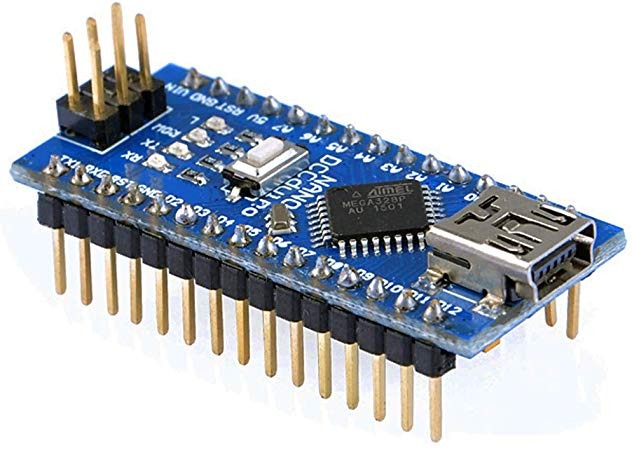






























A. Bảng mạch Adruino Nano: 1, cáp USB TYPE-B sang Mini USB: 1
B. Động cơ bước NEMA 17: 2
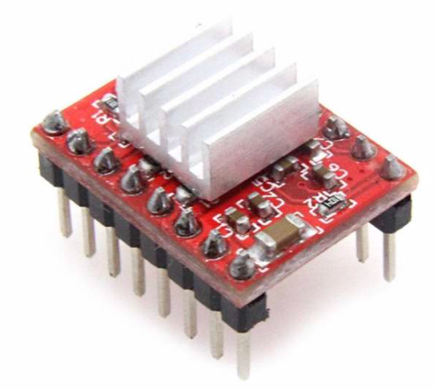
C. 4988 Stepper Motor Driver (bộ điều khiển motor): 2
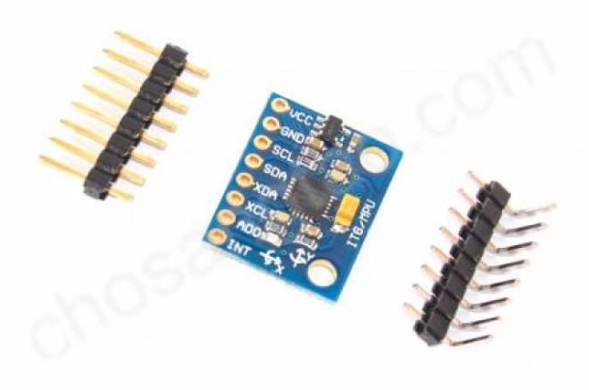
D. GY-521 Accelerometer, tên chip là MPU6050 (bộ cảm biến góc): 1
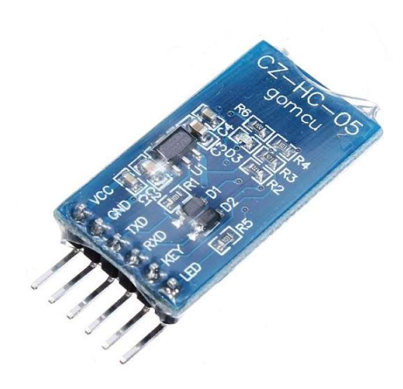
E. HC-05 Bluetooth Module(bộ thu phát bluetooth): 1
F. 11.1V Lipo Battery (3S 2200mAh) (pin Lipo 11.1V): 1
G. 9V Battery (pin vuông 9V): 1
H. Jack nối chữ T đực x 1 (RC T plug): 1
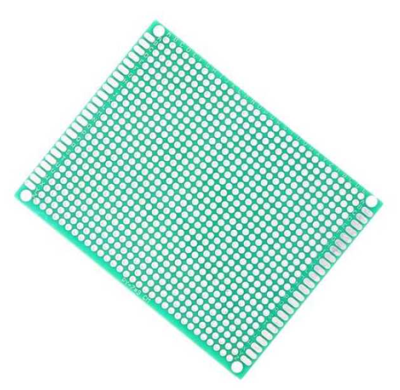
I. Bảng mạch PCB 7x9 cm: 1
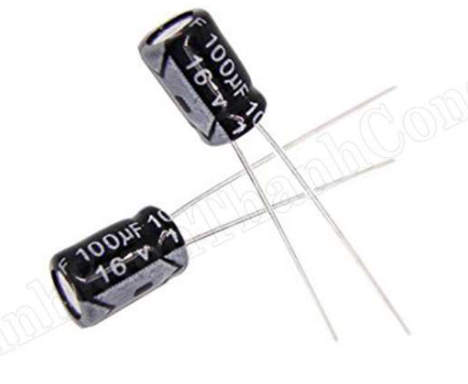
J. Tụ điện 16V (từ 47uF đến 100uF): 2 (47uF~100uF)
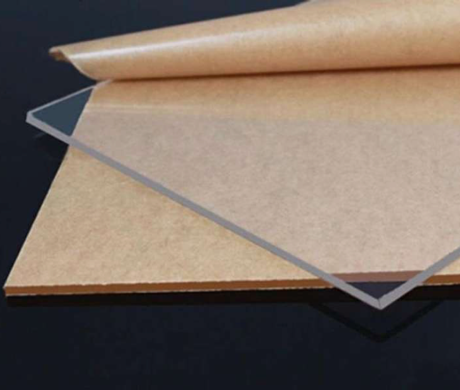
K. Bản nhựa 30x40 cm (dùng để làm thân robot): 1
L. Hợp kim gắn cho động cơ bước Nema 17: 2
M. Khớp nối trục 4mm-5mm hoặc 5mm-6mm: 2
N. Bộ sạc cân bằng cho pin Lipo: 1
O. Dây nối 2 đầu đực: 2
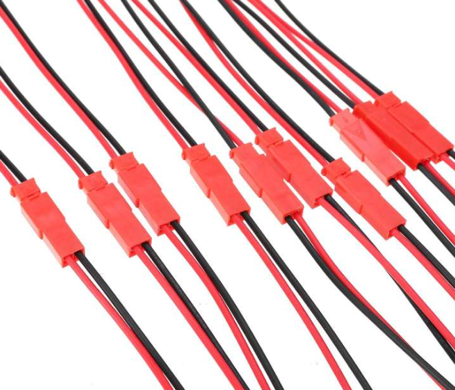
P. Dây nối RCY đực/cái: 4
Q. Pin vít KF301-2P: 6
R. Female Pin Header: 10
S. Vít lục giác Nylon đực/cái: 1
T. Bánh xe cao su đường kính 10cm: 2
II. Điều khiển động cơ bước
A.Chip điều khiển: A4988
B. Motor: nema 17
C. Các màu để liên kết, có thể liên kết 1 trong 3 cách dưới đây:
2B:ĐỎ / 2A:XANH DƯƠNG / 1A:XANH LÁ / 1B:ĐEN
2B:XANH DƯƠNG / 2A:ĐỎ/ 1A:XANH LÁ / 1B:ĐEN
2B:ĐEN / 2A:XANH LÁ / 1A:ĐỎ / 1B:XANH DƯƠNG
D. Cách điều chỉnh điện thế kế: https://youtu.be/5CmjB4WF5XA
E. Các chế độ điều khiển: MS1/MS2/MS3
F. Hiệu điện thế của Pin là 11.1V
không nên sử dụng pin vuông 9V vì sẽ không đủ để vận hành motor
G. Tụ điện: 47uF~100uF
H. Cách thức hoạt động của motor: : https://youtu.be/eyqwLiowZiU?list=PLQWqqoPcxhTxo5UZVggaykB26A6T3zoyj
360°/50= 7.2°
7.2°*2=14.4°
14.4°/8=1.8°
360°/1.8°= 200(step)
Răng cực nam(màu đỏ) <> răng cực bắc(màu xanh lá)


Cách tạo nam châm điện của bánh ngoài theo nguyên tắc bàn tay phải:

III. Điều khiển kết nối bluetooth
A. Bộ điều giao tiếp bluetooth: HC-05, HC-06


1. HC-05 AT command

2. HC-06 AT command

B. Giao tiếp bluetooth: Android app(JAVA)


C. Giao thức UART: Digital oscilloscope (ASCII)
: https://youtu.be/IyGwvGzrqp8
D. HC-05 & HC-06 AT command mode: 115200bps / parameter3: parity bit=0
Hướng dẫn thực hiện mở chế độ AT (cú pháp AT module của HC-05 và HC-06 là khác nhau)
Cách 1:
Bước 1: Liên kết PIN34 của bluetooth module vào GND (low level)
Bước 2: Cung cấp điện cho bluetooth module
Bước 3: Liên kết PIN34 của bluetooth module vào 5V (high level), Module sẽ vào chế độ AT, điều chỉnh baudrate phù hợp với sự giao tiếp, ví dụ như 9600
Cách 2:
Bước 1: liên kết PIN34 vào đầu cấp điện (power supply pin).
Bước 2: Cung cấp điện cho bluetooth module, PIN34 cũng sẽ được cấp điện ở mức cao (high level), sau đó module sẽ vào chế độ AT nhưng baudrate lần này sẽ là 38400. Lúc này người dùng cần phải đổi baudrate ở chế độ AT nếu họ quên baudrate phù hợp để giao tiếp
E. Rx: 3.3v / Tx:5V
IV. Điều khiển bộ cảm biến góc GY-521
A. gyroscope control module: GY-521(MPU6050)
B. 3D Models in Processing
C. Vcc: 3.3v(3V~5V khuyến cáo sử dụng 3.3V vì nếu sử dụng 5V thì module sẽ nhanh chóng bị hỏng)
Normally the Wire library does not do this, but beginners make mistakes and quite frequently destroy these modules. I recommend using level shifters on both data lines for exactly this reason.
D. Giao thức I2C: Master/Slave
E. x/y/z: Roll/Pitch/Yaw

V. Điều khiển cân bằng PID
VI.Mã nguồn Robot cân bằng
B. link: https://github.com/mahowik/BalancingWii.git
C. Khi download về, các file nằm trong tập tin tên là Balancing-master, hãy đổi tên thư mục và đảm bảo các filenằm ở vị trí như hình sau:
VII.Pin lipo và bộ sạc/rã pin : B6 balance Charger
A. Kết nối với sạc cân bằng:

B. Cách sử dụng pin Lipo: https://www.youtube.com/watch?v=jZ7ZSGDVwDM&feature=youtu.be
C. Dung lượng pin Lipo: https://www.youtube.com/watch?v=osfgkFyq7lA&feature=youtu.be
VIII.EZ-GUI app

A. EZ-GUI

Settings




After connecting:


PID SET:You can reference the value of the below.






B. You must start your robot on normal mode(HIGH or MID) at first time. If not, the robot on Position holding will continue to move forward or backward.
i. Mode: "Position holding"/ "HIGH" / "MID"

C. You can see the operation of your gyro sensor.



Commenti